Lo que vamos a hacer ahora es aprender las características que se le pueden atribuir a un sistema. Estáticas y dinámicas (de donde sale el diagrama de Bode, chan, chan, chaaaan…)
Tipo de entrada
Al igual que a la señal, se le puede atribuir a un sistema una topología de entrada. Pero ésto tendrá sus efectos. Veamos qué ocurre según la topología de la señal:
- Single ended y grounded: antes de conectar tendremos una V salida = V generador. Con un sistema no diferencial, de impedancia ideal (infinita), seguiremos teniendo que Ventrada = Vgenerador. Y con un sistema diferencial de impedancia ideal, lo mismo.
- Single ended y flotante: sin problema, será igual
Conclusión: pongamos el sistema que pongamos no va a ocurrir nada, no perdemos señal.
- Diferencial o pseudodiferencial y grounded: antes de conectar la Vsalida = Vgenerador1 – Vgenerador2. Si la conectamos a un sistema no diferencial de impedancia ideal, la Ve = Vgenerador1, pero ¿qué ocurre? Pues que la señal del generador 2 va a masa, y se pierde. Ésto no ocurre en un sistema diferencial donde tendremos una Ventrada1 = Vgenerador1 y una Ventrada2 = Vgenerador2.
- Diferencial o pseudodiferencial y flotante: antes de conectar la salida, mismas condiciones. Cuando la conectemos a un sistema no diferencial, Ve = Vg1 – Vg2. Con un sistema diferencial, Ve = Vg1 – Vg2. No tenemos ninguna pérdida.
Impedancia de entrada de un sistema diferencial
La impedancia de entrada de un sistema no diferencial, pues como que es fácil de calcular e interpretar. Pero la de un sistema diferencial puede tomar dos formas:
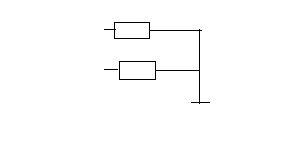
- La impedancia de cada terminal a masa: la calcularíamos poniendo una fuente virtual en un terminal y llevando el otro a tierra, y viceversa. Sale como:
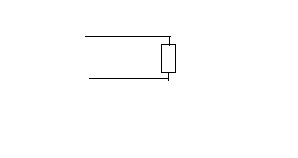
- La impedancia diferencial: unimos un terminal de la fuente a un terminal de entrada y el otro terminal de la fuente al otro terminal de entrada:
Errores en el sistema de procesado
En éste apartado veremos la exactitud, que es la diferencia entre lo que debería resultar y lo que resulta de un sistema. Hay 2 tipos de error:
- Aleatorio: es incontrolable y a saber de dónde sale. Sería un ruido interno, una interferencia externa y cosas así. Impredecible.
- Sistemático: éstos por suerte los conocemos y los podemos predecir y corregir. Son errores de ganancia, de offset, de linealidad…
Podemos expresar éstos errores de forma absoluta (un valor que es el valor ideal menos el valor real) o relativa (en tanto por cien). Allá van unos poquitos:
- El error de offset: se introduce un nivel de continua indeseado, que también será procesado por el sistema
En éste caso a la salida obtendríamos Vs = Ve*Ganancia + Eoffset
Afecta a la función de transferencia, desplazándola arriba o abajo.
Se puede calcular un error de offset a la entrada (RTI), si queremos saber, por ejemplo, tras el sistema de amplificación de la señal del sensor térmico, a cuántos grados de error equivaldrá el offset:
Eo (RTI) = Eo(RTOutput)/G
Si concatenamos 2 sistemas, a la salida tendremos:
E0(RTO) = Eo1(RTO)*G2 + Eo2(RTO)
Eo(RTI) = Eo1(RTO)/G1 + Eo2(RTO)/(G1*G2)
- El error de ganancia: lo que ocurre es que debido a cualquier desviación del sistema (podría ser una resistencia en un amplificador operacional), la ganancia no es exactamente igual a la que queríamos, sino un valor cercano. Ésto afecta a la pendiente de la función de transferencia haciéndola más o menos pronunciada.
Se suele expresar en términos relativos como:
Eg(rel) = |(VeGideal – VeGreal)/VeGideal| *100 = |(Gideal – Greal)/Gideal|*100
Y en términos absolutos como:
Eg(abs) = Eg(rel)*|Vsalidaideal|/100
Sólo recordar que en un sistema en cadena la ganancia total es el producto de todas las ganancias: Gt = G1*G2*…*Gn
También vamos a ver un error aleatorio como es el ruido:
Ruido
Lo único que hay que saber es que se introduce entre medias del sistema, por lo que usualmente se da el error RTO. Lo que hace es que varía la salida:
Vs = Ve*G + Vnpp/2 (porque si te lo dan pico a pico lo que interesa es la amplitud)
También puede ser multietapa como el offset: se multiplicaría el En del sistema 1 por la ganancia del sistema 2 y se sumaría el En del sistema 2.
Dados los errores y calculada la resolución, obtenemos el Margen Dinámico:
MD = Rango de medida/ Resolución
Ancho de banda
Ahora lo que vamos a ver es el rango de frecuencias que nuestro sistema va a poder procesar. Mejor aún, lo vamos a calcular.
Para ello, lo que haremos será sustituir los condensadores por su impedancia compleja (De forma Xc = 1/jwC), y analizaremos el circuito para obtener su ganancia (G = Ventrada/Vsalida) en función de jw. Por lo general lo que tendremos por ahí será un divisor de tensión con la impedancia del condensador. Luego intentaremos dejar la ganancia en una expresión que se parezca a las formas canónicas que voy a dejar a continuación, junto con sus respectivos diagramas de Bode:






Estos dos últimos son el famoso filtro pasobajo y filtro pasoalto. La cuestión es que hay que saberse todas las formas canónicas al dedillo para el diagrama de Bode.
Tened en cuenta que w0 = 1/RC, de aquí extraemos la frecuencia de corte, f = 1/2*pi*RC, que podrá ser superior o inferior dependiendo de la forma canónica. Para ver mejor la forma de la ecuación es mejor despejar w0 por el 1/RC, por ejemplo el término paso bajo se quedaría 1/(1+jwRC), mucho mejor.
¿Que no sabías que había un diagrama de Bode fasorial? Pues ya lo sabes. La fase de la señal cambia también con la frecuencia.
¿Que no sabes dibujar diagramas de Bode? Yo te enseño.
En primer lugar, saber que lo que se usa para el diagrama de Bode es papel logarítmico, como éste:

Como podéis ver, las rallitas no están todas equidistantes. Empieza por 10, la siguiente es 20, 30, 40, 50… Y la siguiente equidistante es 100, 200, 300… Y la siguiente equidistante es 1000, y la siguiente equidistante 10000… Así podemos hacer un diagrama desde 10 Hz hasta 1MHz sin problema.
Lo siguiente es que la ganancia se expresa en decibelios. Ésto se calcula como G(dB) = 20*log(Ve/Vs).
Para hacer el diagrama de Bode, lo más inteligente es poner cada forma canónica sobre el papel con sus frecuencias de corte. Todas por separado, y luego sumarlas todas sobre el papel. Os pongo un ejemplo de los ejercicios que hice yo:
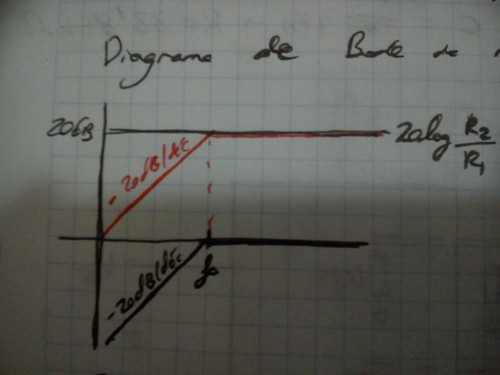
Como se ve, el sistema tenía una ganancia de R2/R1 (era un amplificador operacional amplificador inversor), y un filtro pasa altos. Se colocan ambos donde les corresponde, y la línea roja es el resultado. Interpretación: a frecuencias bajas, el amplificador no multiplica la señal por la ganancia total, sino que la atenúa un poco, mientras que a frecuencias medias, tiene la totalidad de su ganancia.
Frecuencia de corte superior
A veces un sistema va a poder procesar toda la frecuencia que queramos, otras veces no. Vamos a ver lo que ocurre a los amplificadores operacionales reales. Se debe a dos parámetros:
- Slew Rate: cuando hay una variación de tensión a la entrada, al amplificador le cuesta un poco alcanzar el nivel de salida. Se debe a la capacidad de los condensadores internos o externos. Es un dato del fabricante, o se calcula como SR = I/C. La frecuencia máxima es: Fmáx = SR/(pi*Amplitud máxima)
- Gain Bandwidth Product (GBP o GxBW): es un dato que siempre nos va a proporcionar el fabricante del amplificador. Va a equivaler a la frecuencia donde la ganancia, debido a las características internas, es 0 queramos o no. La frecuencia máxima es fmáx = GBP/Ganancia
Como se podrá suponer, la frecuencia mínima de las frecuencias máximas (entre GBP, SR y filtro paso bajo), es la frecuencia máxima del sistema.
Lo próximo es ver qué tipos de bloques funcionales podemos incluír en el diseño. Es rapidito.











