En la nueva asignatura de sensores, que he fundido con instrumentación, porque están basadas en lo mismo, vemos nuevos sensores y sus características.
En éste apartado veremos los sensores de temperatura existentes, pero no simplemente el LM35…
Elementos bimetálicos
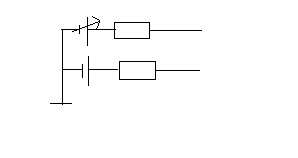
Es un trasductor que transforma cambios de temperatura en deformaciones mecánicas debido al coeficiente de dilatación de los materiales de los que se compone. Normalmente está formado por dos placas de metales distintos unidos, en distintas configuraciones.
Las deformaciones que la temperatura produce en uno de ellos se aprovechan para hacer indicadores de temperatura como éste:

También se usan para interruptores térmicos, termostatos y cebadores, elementos que necesitan partes mecánicas. Es muy importante su aplicación en campos donde no se pueda usar la electricidad o componentes derivados del mercurio, por ejemplo medida en gases inflamables, productos químicos o alimentación.
A pesar de que son bastante económicos y robustos, presentan una respuesta bastante lenta y no muy exacta, y la medida de temperatura no es puntual, sino que se distribuye por toda la superficie bimetálica.
Resistencias termométricas

Como ya se vio en el apartado de puentes de instrumentación, estas resistencias hechas de distintos materiales, generalmente platino (RTP), por ser el más lineal, varía su resistencia según la temperatura y el coeficiente del material.
R(T) = Ro(1+aT)
Al ser un elemento tan lineal, una RTP se puede cambiar por otra sin recalibrar el circuito. No todas las RTP tienen los mismos coeficientes, a partir de cierto rango de temperaturas pueden variar. Por lo general, todas tienen una constante
a = 0.00385 ºC^-1
Su rango de temperaturas va desde los -200 a los 850 ºC. A la hora de medir se tiene que tener en cuenta que el paso de corriente por su misma resistencia disipa potencia y aumenta la temperatura del sensor.
Termopares

Éste tipo de sensor aprovecha el efecto Seebeck: en un circuito con dos metales homogéneos distintos unidos en sus extremos, y éstos a distinta temperatura, aparece una corriente eléctrica en función de la diferencia de la temperatura.
Sin embargo, no aparece el mismo potencial para pares de temperatura distintos, es decir, no es lo mismo medir con la punta 1 a 100ºC y la punta 2 a 0ºC que con la punta 1 a 200ºC y la punta 2 a 100ºC, aunque la diferencia sea de 100ºC igual. Es por ésto que se debe enfriar, o compensar, la “punta 2” o unión fría, a 0ºC.
Aun así, veremos que en la realidad ésta llamada unión fría no existe como tal, porque la unión de un tercer metal cuyas uniones están a la misma temperatura no afecta a la medida, entonces añadimos el cobre del circuito que mide la diferencia de tensión y queda así:

La medida de un termopar no es lineal, sino que tiene muchas curvas, podría llegar a necesitar hasta 9 coeficientes dependiendo del tipo y el rango de temperaturas. A un rango pequeño de temperaturas podría linealizarse, pero como todo ésto es muy complejo se han creado unas tablas que dan la tensión a distintas temperaturas teniendo la unión fría a 0ºC.
Entonces se puede compensar la unión fría mediante un circuito que dé la tensión necesaria para la compensación, o directamente conociendo la temperatura de la unión fría se dirige a las tablas y se suma la tensión de la temperatura de la unión fría a la tensión que está dando el termopar, obteniendo otra tensión que ahora sí, te diriges a su posición en la tabla y obtienes la temperatura real de la unión caliente.
Termistores

Existen dos tipos de termistores
- NTC: el coeficiente es negativo
- PTC: el coeficiente es positivo

Se tratan básicamente de semiconductores hechos de óxidos metálicos dopados, como se puede observar, no son lineales y además no tienen mucha repetibilidad ni exactitud. Comparado con una RTP:

Su fórmula es entonces exponencial: R = A*e^(B/T)
También R = R_o * e^B((1/T)-(1/T_o))
Los parámetros A y B se calibran en 3 puntos distintos, obteniendo una tabla según el modelo y fabricante.
Para hacerlos más lineales, se puede poner una resistencia en paralelo, aunque pierda sensibilidad. También se venden pares de termistores integrados en uno solo que mediante un simple circuito se hace lineal. Pero no es lo más común.
Sus aplicaciones suelen estar en la protección de circuitos contra sobrecalentamientos, por ejemplo en muchas fuentes de alimentación se pueden encontrar termistores a la entrada para limitar la corriente.
Sensores integrados

Se basan en la sensibilidad de la unión semiconductora, tienen un coste bajo, una sensibilidad muy alta, aunque un reducido rango de temperaturas (limitado por las propiedades térmicas del encapsulado, principalmente) Como ejemplos tenemos:
- Lm335: salida proporcional en grados Kelvin 10 mV/K
- Lm35: salida proporcional en grados celsius 10 mV/ºC
- AD590: salida por corriente de 1 uA/K, a dos terminales
- MAX6625: es un sensor con conversión ADC y comunicación serie que además se puede programar