“Introducción” se llama el tema, e introducción le pongo como título. Más bien es una presentación extensa de 107 diapositivas, pero aquí estoy yo, otra vez, para resumirlo. Así que sin miedo, vamos a ponernos a ello:
¿Por qué electrónica de potencia? Otra vez más, nos surge la necesidad de transformar la energía eléctrica de la red de suministro eléctrico a otra de sus formas, AC o DC, que sea útil para el consumidor. De ésto ya hemos visto un poco en analógica, fuentes de alimentación, sin embargo, las fuentes lineales pueden no ser lo suficientemente potentes para la aplicación que buscamos, además de que queremos transformar la energía de distintas formas:
- AC a AC: regulador de alterna.
- DC a AC: Inversor.
- AC a DC: Rectificador, controlado o no.
- DC a DC: Troceador.
Por ahora lo que nos va a ocupar, ya que es la base del resto, es el troceador. Éste se basa en un “simple” circuito compuesto por un semiconductor de potencia trabajando en conmutación, cuya función es, precisamente, trocear la señal continua de entrada; y un filtro antes de la carga, que se encargue de dejar la señal cuadrada que queda tras el semiconductor lo más continua posible. El semiconductor está controlado por un circuito de disparo, que no se va a ver todavía, que muestrea la salida, la referencia y cambia o bien el periodo o bien el ancho de pulso de la señal.
Análisis de los circuitos
Pero ésto que me cuentas ¿será verdad?¿Cómo puede funcionar así? Pues hay gente que antes que nadie se preocupó de estudiar ésto y sacar fórmulas que nos ayudan a calcular lo que ocurre en los circuitos. Vamos a empezar por los componentes del filtro, los pasivos:
Es un componente que se crea mediante un conductor enrollado sobre sí mismo. Normalmente, en potencia tendrán un núcleo de algún material ferromagnético que le otorga unas propiedades distintas al campo magnético que la bobina crea con el paso de corriente.
La corriente, es lo que le importa a las bobinas. Éstas van a intentar por todos sus medios posibles que la variación de corriente en un circuito sea la menor posible. Si tu intentas variar la corriente que pasa por una bobina, ésta va a responder mediante un aumento de tensión en el sentido contrario. Las fórmulas que expresan ésto son:
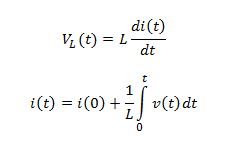
Donde L es la inductancia, propiedad de cada bobina, y se mide en Henrios. La que más se utiliza es la fórmula de la tensión, y lo que nos indica, a simple vista, es que si se aplica un aumento de corriente muy grande, en muy poco tiempo, la tensión en la bobina aumenta. Por ésta razón, no podemos usar (aunque en la vida real no existan) pulsos 100% cuadrados, ya que la variación en t=0 hace la tensión infinita.
Otra propiedad de las bobinas es que si su L es muy grande, tiene mayor capacidad de evitar los cambios de corriente, por lo tanto podemos considerar, a efectos teóricos, que es una fuente de corriente constante.
Y otra cosa que nos interesa es sabe que, en régimen estacionario (la señal se ha estabilizado, las tensiones y corrientes empiezan y terminan en el mismo punto cada periodo) el valor medio de la tensión en extremos de la inductancia es nulo, VL(av)=0.
Ya escribí sobre él en 2 ocasiones: condensadores I y condensadores II.
Sus fórmulas (ésta vez con diferenciales) son:
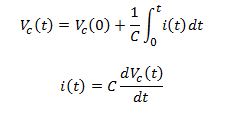
Y la más utilizada es la segunda, que indica lo mismo pero al contrario: si aplicamos una variación de tensión, se produce una corriente en el condensador. Ésto va a hacer, igualmente, que no podamos tener señales puramente cuadradas, por la razón de que la corriente se haría infinita, cosa que no puede ser.
También de la misma forma, si la capacidad del condensador es muy grande, podemos considerar que las variaciones de tensión son muy pequeñas, y por lo tanto sería una fuente de tensión. Ésto hace que consideremos una tensión de salida constante a la hora de analizar algunos circuitos.
Por último, es el valor medio de la corriente por el condensador el que toma valor 0 en régimen estacionario.
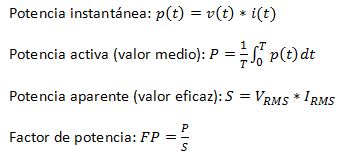
Son valores de magnitudes que ya hemos mencionado antes:
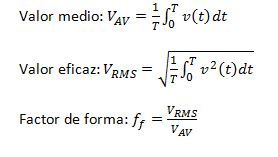
No os asustéis con las integrales, porque luego son funciones periódicas totalmente que se pueden trocear en 2 partes y hacer la integral sin tablas ni historias.
Ahora vamos a hablar de potencias, igual que se hizo en electricidad, pero con unas fórmulas que sirven para todo tipo de corriente, no sólo AC.
- Circuito R en conmutación
Basado sólo en una fuente, un semiconductor en conmutación y una resistencia como carga, lo que obtendremos son formas puramente cuadradas de todas las magnitudes (excepto la de entrada, claro). En realidad no necesitaríamos éste apartado, ya que aplicando las fórmulas anteriores sale lo mismo.
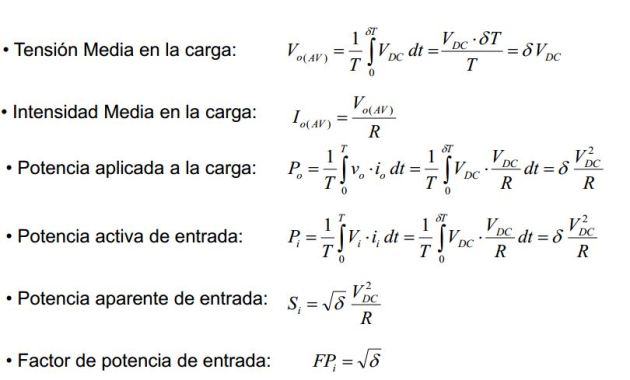
Y ahí os presento a delta, el símbolo ése extraño. Es el ciclo de trabajo, en porcentaje. Más bien es la relación de tiempo activo (el semiconductor está en ON) con el tiempo total. Así, por ejemplo delta*T es el tiempo total que pasa corriente por el semiconductor.
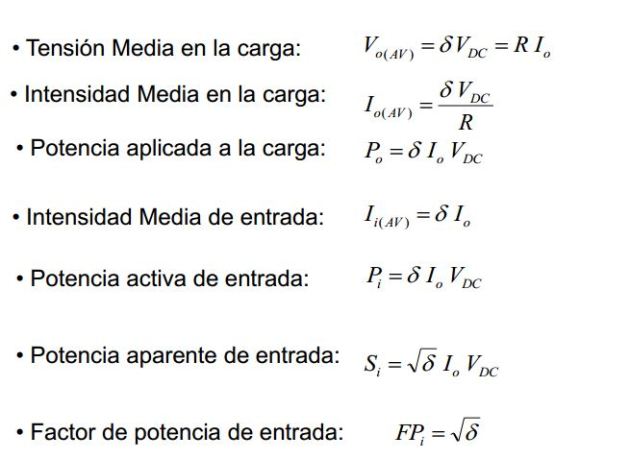
- Circuito R y L (muy alta) en conmutación
Aquí la cosa cambia porque la bobina tiene un transitorio, un tiempo de carga y descarga. Lo más destacable es que se considera que la corriente es constante.
Semiconductores de potencia
Para trocear la señal de entrada se utilizan semiconductores de potencia, cuyas características difieren un poco de los semiconductores normales. Para empezar, ya no vamos a considerar que la conmutación se produce instantáneamente, que no hay pérdidas de potencia o que la temperatura no nos importa, cada semiconductor va a tener unas características que irá demostrando conforme vaya desempeñando sus funciones:
Cuando el semiconductor recibe la señal de activarse por su terminal correspondiente, éste tarda un poco en reaccionar, éste es el tiempo de retardo (delay, td), y las magnitudes no empiezan a cambiar hasta que éste se acaba. Una vez pasado éste pequeño tiempo, hay un tiempo de subida (rise, tr), tiempo que tarda la corriente que pasa por el semiconductor en alcanzar su máximo. Cuando hay una bobina en el circuito con un valor de inductancia muy grande, éste tiempo se distribuye en 2:
- tri: cuando pasa el tiempo de delay, la corriente empieza a aumentar, pero la tensión se mantiene
- tfv: una vez la corriente llega a su máximo, la tensión que cae en el semiconductor empieza a disminuir (voltage fall)
De la misma forma, cuando llega la señal de desactivar el semiconductor, tarda un tiempo en reaccionar que llamamos tiempo de almacenamiento (storage, ts, tdoff), y después hay un tiempo de bajada (fall, tf), tiempo que tarda la corriente en llegar a su mínimo. Con inductancia también se distribuye en 2:
- trv: al pasar el delay, la caída de tensión en el semiconductor empieza a aumentar, manteniendo la corriente constante.
- tfi: una vez la caída de tensión llega al máximo, la corriente empieza a caer hasta el mínimo.
Son éstos tiempos de subida y bajada los que hacen que la potencia en el momento de la conmutación aumente (porque se encuentran la corriente y la tensión máximas en un punto). Para evitar excesos de disipación se deben tener en cuenta éstas propiedades y ajustar un periodo y ciclo de trabajo adecuados:

Tipos de semiconductores de potencia
Sí, hay semiconductores más allá de los transistores, y es necesario saber cuál usar en su aplicación. Por ejemplo, un tiristor soportaría una potencia enorme (es el dispositivo con más capacidad de potencia), pero trabaja a frecuencias bajas, y un MOSFET trabajaría a frecuencias muy altas, pero la potencia que soporta no es ni parecida.
Ya conocido, es un dispositivo unidireccional, sin control. Los de potencia son capaces de soportar mayor corriente por tener una sección más grande, y una tensión más elevada debido a la región de deriva añadida en su estructura interna. Lógicamente no tienen la misma forma:

Éste va a ser nuevo para nosotros: se trata de un diodo con una entrada de disparo, que se activa de una forma bastante sencilla aplicando tensión en la puerta, pero su bloqueo no lo es tanto, ya que es necesario el paso por 0 de la tensión en ánodo. En AC el bloqueo es natural en cada semiciclo, pero en DC es necesario un circuito para forzarlo.
Se recomienda retirar el pulso una vez disparado el dispositivo para evitar que disipe potencia por su terminal de activación, así como hacer el pulso compuesto por un tren de pulsos. Ésto ayudará a aumentar su vida útil.
Es igual que el SCR, pero como si hubieran puesto dos en antiparalelo, de forma que conduce bidireccionalmente.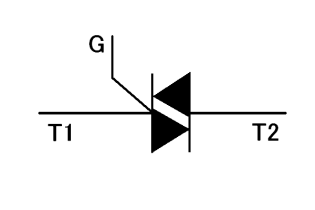
Es igual que el BJT normal, sólo que soporta más corriente y tensión, aunque menos que un SCR. Se controla mediante corriente por la puerta. Al ser de potencia, se añaden dos nuevos conceptos:
- Área de trabajo seguro (SOA): es una gráfica que relaciona Ic y Vce, y mediante unas líneas delimita el área de trabajo en la que el transistor no se destruye. Los límites vienen dados por la corriente máxima de colector, la tensión Vce máxima, la potencia disipable, y la segunda ruptura, que es un efecto producido por haber puntos de mayor conducción en la estructura interna, y por lo tanto de mayor potencia y temperatura, que puede alcanzar su máximo valor y fundir el componente.
- Embalamiento térmico: es un efecto producido por el aumento de temperatura en el componente. Al aumentar la temperatura, es capaz de aumentar la corriente que pasa a través de él, y ésto hace que aumente la temperatura, aumente la corriente, aumente… Y así hasta que se destruye. Se puede evitar controlando la temperatura o mediante circuitos externos, como se hace en amplificadores de audio.
No es igual que el MOSFET normal, ya se verá después por qué. Lo que sí es igual es su alta impedancia de puerta. Los MOSFET de potencia tienen, en su mayoría, un diodo de protección entre drenador y surtidor, y son muy fáciles de poner en paralelo, ya que no necesitan resistencias para trabajar a la vez.
Tiene un SOA delimitado únicamente por la tensión Vds máxima, la corriente Id máxima y la temperatura máxima, Tjmax. Al contrario que el BJT, cuando aumenta la temperatura se reduce la corriente máxima que es capaz de conducir.
Es un híbrido entre MOSFET y BJT. Tiene puerta a la entrada, con impedancia muy elevada (se dispara igual que el MOSFET de potencia), un SOA sin segunda ruptura, y unas características de tensión y corriente de conducción similares a las de un BJT. También es fácil ponerlos en paralelo.

Disparo de los semiconductores
Uno de los inconvenientes que se van a encontrar a la hora de diseñar el circuito de potencia, es que los semiconductores necesitan ser disparados aplicando el disparo entre puerta y surtidor o puerta y cátodo, depende de cómo se llame. Para ello se deberán utilizar:
- Transformadores de impulsos: transforman un impulso del primario al secundario, siguiendo también una relación dependiente de su número de espiras. El inconveniente es que no transmite continua. Lo bueno, elimina interferencias debidas a las altas frecuencias.
- Optoacopladores: éstos sí que pueden transmitir continua, pero necesitan una fuente de alimentación auxiliar que esté aislada del circuito principal.
Además, los MOSFET de potencia tienen una forma distinta de dispararse, siguiendo una secuencia:
- Conmutación a ON: se aplica una corriente (sí, corriente) mayor que 0 en la puerta
- Mientras conduce, la corriente tiene que ser igual a 0
- Para conmutar a OFF se aplica una corriente menor que 0 (básicamente, se va a descargar el condensador parásito).
Caracterísiticas térmicas
Éstas van a depender de la serie de semiconductor, el tipo de encapsulado (TO92, TO126, TO220 y TO3 son los más comunes) e incluso afecta el fabricante, aunque intenten que las características sean aproximadamente las mismas.
Para hacer un cálculo aproximado de la temperatura, la potencia máxima, o la resistencia térmica del disipador que necesitamos, hacemos una analogía con la ley de ohm: la temperatura es la tensión (hay una diferencia, temperatura interna y externa), la potencia es la corriente y la resistencia térmica es la resistencia. Tj-Ta = P*Rt
¿Qué es la resistencia térmica? Es la proporción en la que va a aumentar la temperatura cuando se aplica una potencia. En las hojas de datos podemos encontrar varias resistencias térmicas que vienen con nuestro semiconductor:
- Rjc: Resistencia junction-case, la junction es la estructura interna del semiconductor, a veces llamadas pastillas por su forma cuadrada, y case es lo que vemos, lo que cubre la pastilla.
- Rca: Resistencia case-ambient, la resistencia térmica que hay entre la “cáscara” y el ambiente.
Encontraremos también la Tjmax, la temperatura máxima que puede alcanzar la pastilla, será la temperatura inicial. Para tener un estándar aproximado, la temperatura al otro extremo del “circuito”, la temperatura ambiente, se suele considerar de 40ºC, pero se debe aumentar si se va a trabajar en un ambiente industrial especialmente cálido.
Así pues, ya hemos calculado la potencia que tiene que disipar el semiconductor, y necesitamos saber qué disipador le vamos a añadir para que no se queme. Lo que hacemos es poner las resistencias Rjc, Rcr (case-radiator) y Rra (radiator-ambient) en serie, las temperaturas a los extremos y que las atraviese la potencia. Calculamos entonces la Rra, y con éste dato consultamos las hojas de datos de los fabricantes de disipadores.

(Ésta imagen no incluye la Rcr, ésto puede ser debido al uso de pasta térmica [prácticamente obligatorio en todos los casos], cuya resistencia térmica es despreciable)
Y éste es el final de la “introducción”. Si queréis más, lo próximo son fuentes conmutadas, y empezaremos a hablar de circuitos e integrados para el control, pero habrá que esperar a que yo termine el tema. ¡Buena suerte!.